What's New
What's New
最新更新日:平成31年2月8日 一覧
[ 2019年1月23日(水) JUIDA/JUTM/JUAV連携による初の公開実験 ]
無人航空機の目視外飛行の実現に向けた福島ロボットテストフィールドにおける実証実験成功
昨今、無人航空機は撮影や農薬散布、インフラ点検などの分野で利用が広がっており、新たな産業・サービスの創出や国民生活の利便や質の向上に資することが期待されており、福島ロボットテストフィールド(以下福島RTF)は無人航空機による大規模な実証実験を行うことが出来る数少ない施設の一つであります。この度、一般社団法人日本UAS産業振興協議会(代表理事長:鈴木真二、所在地:東京都文京区、以下JUIDA)一般財団法人総合研究奨励会日本無人機運行管理コンソーシアム(代表:鈴木真二、以下JUTM)は、昨年7月に開所した福島RTFの通信塔の機能を用いて、将来的な無人航空機の発展のために、福島RTFにて目視外飛行に向けた実証実験を開催しました。
今回の実証実験では、初めてJUIDA、JUTM、JUAVという日本のドローン産業を代表する3団体が連携し、今後のドローン産業の持続的発展のために不可欠と考えられる、操縦技能・機体・運行管理システムという面での評価基準のあり方を検討しました。
実証実験には石田総務大臣も視察に訪れ、福島RTFの現状や今回の実証実験の意義・目的をご説明しました。
今回の実証実験の評価内容は3月13日(水)~3月15日(金)で開催されるJUIDA主催、日本最大の無人航空機単独展示会である『Japan Drone 2019』にて、公表されます。
≪ 実 施 概 要 ≫
日時
-
2019年1月23日(水) 8:30~16:00
実施場所
-
福島ロボットテストフィールド(福島県南相馬市原町区萱浜赤沼61)
実証概要
-
通信塔を用いた無人航空機の大規模目視外飛行実験。機体、操縦・運用、運航管理システムについて、RTFで実施可能な評価の基準や手順について下記の項目でそれぞれ検証を実施した。
- ①JUTM担当:目視外飛行(補助者なし)を実現する運行管理システムを活用したガイドライン策定および試験実証
- ②JUAV担当:目視外飛行(補助者なし)における機体認定の評価基準作成及び試験実証
- ③JUIDA担当:目視外飛行(補助者なし)における操縦技能認定の評価基準作成及び試験実証
参加団体
-
一般社団法人日本UAS産業振興協議会、一般財団法人総合研究奨励会日本無人機運行管理コンソーシアム、一般社団法人日本産業用無人航空機工業会、東京大学、国立研究開発法人情報通信研究機構、国立研究開発法人宇宙航空研究開発機構、国立研究開発法人 海上・港湾・航空技術研究所 電子航法研究所、株式会社日立製作所、株式会社日立システムズ、綜合警備保障株式会社、株式会社イームズロボティクス、株式会社ブルーイノベーション、損害保険ジャパン日本興亜株式会社、日立建機株式会社、株式会社ドローンママ、株式会社自律制御システム研究所、ヤマハ発動機株式会社、田中電気株式会社、株式会社スペースワン、有人宇宙システム株式会社、一般財団法人日本気象協会(順不同、敬称略)
協力機関
-
福島県、福島県南相馬市、公益財団法人福島イノベーション・コースト構想推進機構
≪ 実 施 内 容 ≫
① 目視外飛行(補助者なし)を実現する運行管理システムを活用したガイドライン策定および試験実証(JUTM担当)
-
今回の実証実験は、福島RTFに設置された運行管理システム(UTM)および通信塔の機能を活用した、複数のドローンによる目視外飛行試験を実施した。今後、JUTMは福島RTFで補助者を必要としない目視外飛行を実現するために、福島RTF及び当該施設に整備された運行管理システムなどの設備を活用した、し、福島RTFにおける「目視外飛行ガイドライン」を策定する。このガイドラインに基づき、福島RTFが国土交通省「無人航空機の目視外飛行に関する要件」を満足できる施設か評価する。
-
(d)損害保険ジャパン日本興亜 (e)日立建機・ドローンママ (f)日立システムズ・綜合警備保障・イームズロボティクス

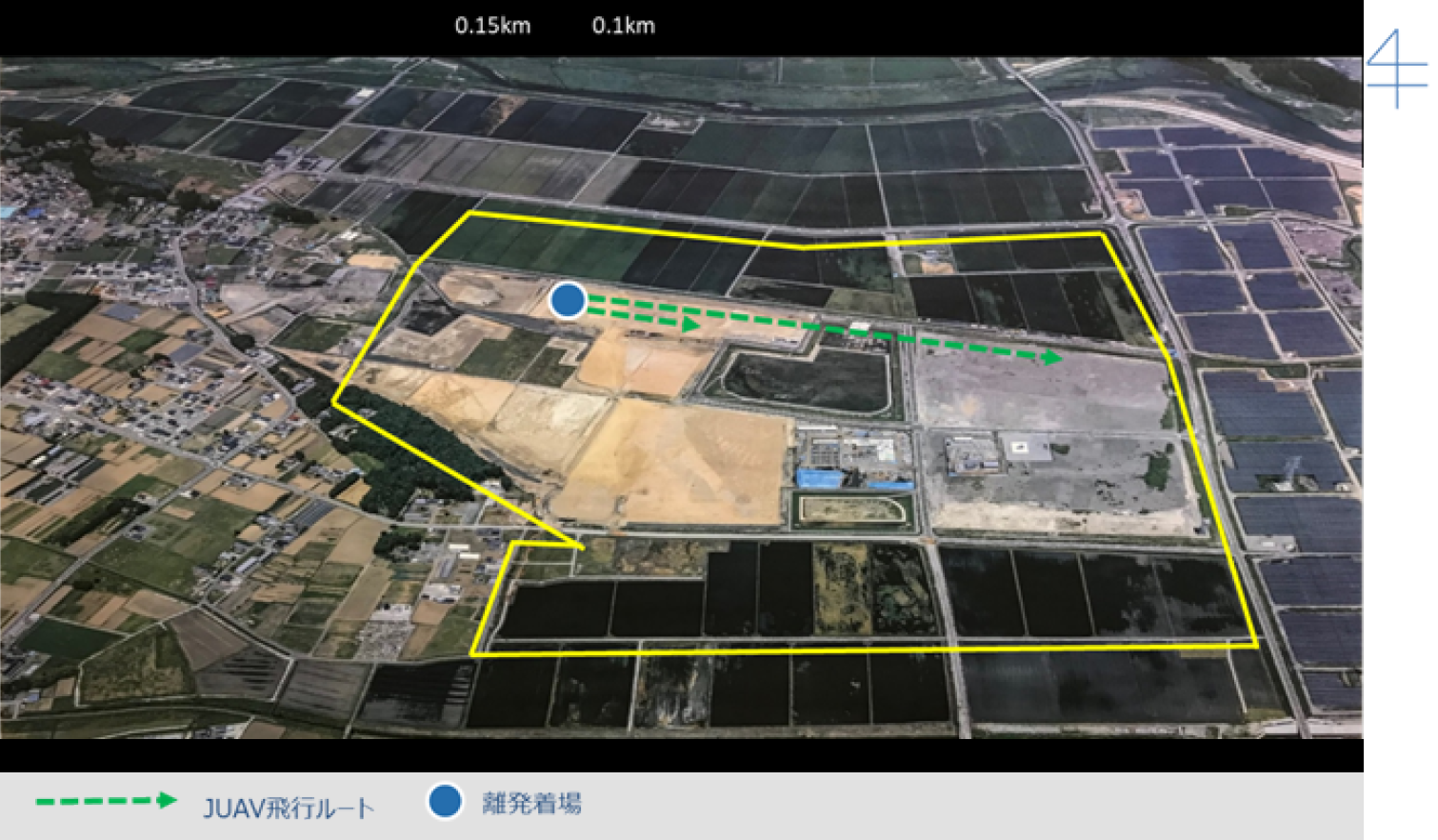
② 目視外飛行(補助者なし)における機体認定の評価基準作成及び試験実証(JUAV担当)
-
今回の実証実験は、目視外飛行において機体が適切なトラブル回避機能を備えているかを実証し、これからの機体の性能評価を行う為の検証実験と位置付けている。そのため、今回は目視外飛行において機体が通信をロストしたケースを想定し、適切な場所に自動で緊急着陸が行えるかどうかの実験を実施する。また、福島RTFが目視外飛行における機体評価試験を実施するにあたって適切な施設であるかどうかという点を検証する。
-
(a)自律制御システム研究所 (g)ヤマハ発動機
③ 目視外飛行(補助者なし)における操縦技能認定の評価基準作成及び試験実証(JUIDA担当)
-
今回の実証実験は、来る目視外飛行による運用の時代を見据え、現在JUIDAが無人航空機の運用人材の認定ライセンスとして発行している「JUIDA無人航空機操縦技能証明証」および「JUIDA無人航空機安全運航管理者証明証」を超える更に高度なライセンスを作成するにあたっての前段階として位置付けている。そのため、今回は目視外飛行時において、飛行経路に他のドローンが侵入してくる等のトラブル発生時の安全運航体制についての試験を実施する。また、福島RTFが当該認定試験を実施するにあたって適切な施設であるかどうかという点を検証する。
-
(a)自律制御システム研究所 (b)ブルーイノベーション (c)田中電気

実験機体紹介

(a)自律制御システム研究所

(b)ブルーイノベーション

(c)田中電気

(d)損害保険ジャパン日本興亜

(e)日立建機・ドローンママ

(f)日立システムズ・綜合警備保障・イームズロボティクス

(g)ヤマハ発動機
≪ 実 証 の 様 子 ≫

開会式の様子

通信塔設備(通信塔付近)

運行管理システム(UTM)

JUTM実証の様子

JUTM実証の様子

JUAV実証の様子

JUIDA実証の様子

JUIDA実証の様子
総務大臣視察の様子
-
一般社団法人日本UAS産業振興協議会(JUIDA:Japan UAS Industrial Developnent Association)は、近年飛躍的な発展を遂げている無人航空機システム(UAS)の、民生分野における積極的な利活用を推進し、UAS関連の新たな産業・市場の創造を行うとともに、UASの健全な発展に寄与することを目的とした中立、非営利法人として、2014年7月に設立されました。国内外の研究機関、団体、関係企業と広く連携を図り、UASに関する最新情報を提供するとともに、さまざまな民生分野に最適なUASを開発できるような支援を行っています。同時に、UASが安全で、社会的に許容されうる利用を実現するために、操縦技術、機体技術、管理体制、運用ルール等の研究を行うとともに政策提言を行っています。
-
代表者:理事長 鈴木 真二
-
日本無人機運行管理コンソーシアム(JUTM:JAPAN Unmanned System Traffic & Radio Management Consortium)はドローンを含む 無人機にかかわる各種施策実現の支援と事業化を推進するための実行組織として、2016年 7 月に東京大学大学院工学系研究科総合研究機構内に事務所を有する一般財団法人総合研究奨励会のもとに設立しました。 本コンソーシアムは、ドローンに代表される無人機の産業利用を含む社会実装の円滑な推進、国際競争力のある安全運航技術の確立、 無人機を利用した事業モデルの実現と輸出推進を図り、将来ビジョンとして「新たな産業空間『ドローン・イノベーション空間』の創造」による空の産業革命実現をめざしています。
-
代表者:代表 鈴木 真二
-
日本産業用無人航空機工業会(JUAV:Japan UAV Association)は、日本産業用無人航空機協会(2004年~)を前身として2017年に、「会員相互の協力により、産業用無人航空機の安全かつ健全な利用を推進し、産業用無人航空機市場の発展と公共の利便性の向上に寄与する」ことを目的として設立されました。当工業は自主的な安全基準の制定、無人航空機規格の標準化活動への参画、政府の諸施策に対応する諸活動等を通じて無人航空機の普及・産業振興と安全な運用環境の整備とに向けて取り組みを行っています。
-
代表者:会長 阪口 晃敏
≪ 本件に関するお問い合わせ先 ≫
一般社団法人日本UAS産業振興協議会(JUIDA) 広報
-
TEL : 03-5244-5285
E-mail : press@uas-japan.org
一般財団法人総合研究奨励会 日本無人機運行管理コンソーシアム(JUTM) 事務局
-
TEL : 03-4405-3500
E-mail : jutm@sogo.t.u-tokyo.ac.jp
一般社団法人日本産業用無人航空機工業会(JUAV)
-
TEL : 053-525-7319